Research / Areas of ResearchRobotics and Autonomy
Creating machines that interact with complex environments, make decisions, take action, and collaborate with humans and one another
 On land, in air, in space, and underwater, as individuals and as teams, autonomous machines increasingly impact infrastructure, healthcare, security, manufacturing, and the environment. Our research in robotics and autonomy drives fundamental advances in materials, actuation, and sensing and control; sensorimotor integration; locomotion, manipulation, and swarm behavior; machine perception and cognition; and human-robot interaction.
On land, in air, in space, and underwater, as individuals and as teams, autonomous machines increasingly impact infrastructure, healthcare, security, manufacturing, and the environment. Our research in robotics and autonomy drives fundamental advances in materials, actuation, and sensing and control; sensorimotor integration; locomotion, manipulation, and swarm behavior; machine perception and cognition; and human-robot interaction.
View robotics and autonomy faculty
![]()
Research Area Subtopics
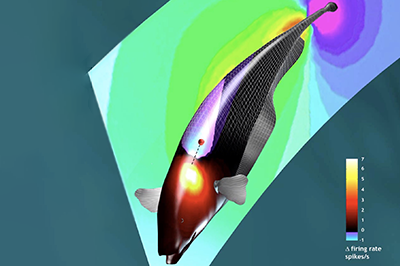
Bio-inspiration, Neuromechanics, and Neuroscience
We study sensorimotor integration in model animal systems to better understand neuromechanics and to derive inspiration for robots. We particularly seek to understand how animals move their bodies and sensory organs in order to execute behaviors, such as prey capture. Model systems include rat whisking and the electrosense of the black ghost knifefish.
(E. Colgate, M. Peshkin)
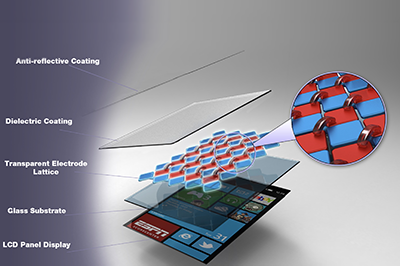
Human-machine Systems
We investigate a broad range of topics in human-machine systems including haptic interfaces to virtual environments, haptic feedback on touch surfaces, human-in-the-loop control systems to augment motor learning, human-robot co-adaptation, especially in the context of rehabilitation, and dynamic allocation of autonomy in the context of human-robot teams.

(M. Rubenstein)
Swarm Robotics and Decentralized Computation
Networked systems often exhibit emergent behavior. In nature, for example, flocks of birds, schools of fish, and swarms of bees all develop cohesive global behavior from purely local interactions. We develop tools to design local control, communication, and estimation laws for individual agents that yield a desired group behavior such as self-assembly or locomotion.
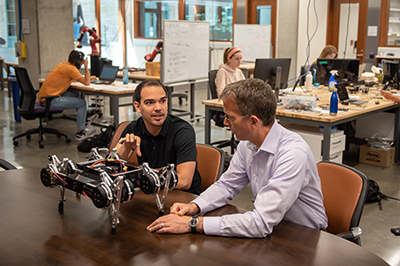
Autonomous Systems
Autonomous systems use sensory data, artificial intelligence, machine learning, and motion planning and control to make real-time decisions about how to act in changing environments. We explore new ways for robots, vehicles, and other powered devices to achieve sophisticated autonomous behaviors, including locomotion on complex terrain, multi-fingered or nonprehensile manipulation, and automation in manufacturing.
sensors. (R. Truby)
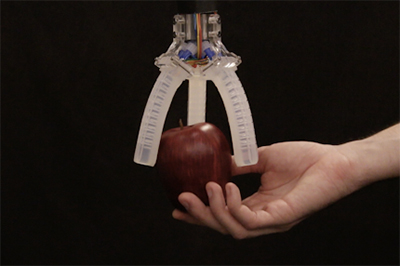
Soft Robotics
We develop soft devices and machines with novel bioinspired actuation, perception, control, and power capabilities. This work includes the synthesis and characterization of functional soft, polymeric, and nanoscale materials, the development of novel additive and digital manufacturing methods, and the design of soft robotic structures with embedded sensors, actuators, and control.
![]()
ME Faculty

Brenna Argall
Professor of Computer Science
Professor of Mechanical Engineering
Professor of Physical Medicine and Rehabilitation

Jian Cao
Associate Vice President for Research
Cardiss Collins Professor of Mechanical Engineering and (by courtesy) Civil and Environmental Engineering, Industrial Engineering and Management Sciences, and Materials Science and Engineering
Director, Northwestern Initiative for Manufacturing Science and Innovation (NIMSI)

J. Edward Colgate
Walter P. Murphy Professor of Mechanical Engineering
Director, NSF Engineering Research Center on Human AugmentatioN via Dexterity (HAND)



Mitra Hartmann
Chair and Professor of Biomedical Engineering
Professor of Mechanical Engineering
Professor of Computer Science (by courtesy)




Michael Peshkin
Professor of Mechanical Engineering
Allen K. and Johnnie Cordell Breed Senior Professor in Design

Michael Rubenstein
Associate Professor of Computer Science
Associate Professor of Mechanical Engineering

Ryan Truby
Assistant Professor of Materials Science and Engineering
Assistant Professor of Mechanical Engineering
June and Donald Brewer Junior Professor
Courtesy Faculty

John Rogers
Louis Simpson and Kimberly Querrey Professor of Materials Science and Engineering, Biomedical Engineering and Neurological Surgery (and by courtesy Electrical and Computer Engineering, Mechanical Engineering, Chemistry and Dermatology)
Director, Querrey Simpson Institute for Bioelectronics

Petia Vlahovska
Professor of Engineering Sciences and Applied Mathematics and (by courtesy) Mechanical Engineering and Physics and Astronomy