 Research
ResearchNorthwestern Robotics Team Demonstrates Mocobots to Tech Leaders
The Omnid team was one of 20 demonstrations at the MARS Conference

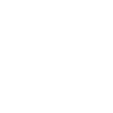
From March 24-26, researchers in the Center for Robotics and Biosystems (CRB) demonstrated their Omnid mocobots, mobile collaborative robots designed to help humans easily manipulate large, awkward payloads, at the annual invite-only Machine learning, Automation, Robotics, and Space (MARS) Conference in Ojai, California. Hosted by Jeff Bezos and Amazon, MARS brings together leaders in science, engineering, business, and the arts.
The Omnid team was one of 20 technical demonstrations, which included recent and future NASA missions, technology for restoring motor control after spinal cord injury, and a swallowable pill-shaped robot for visually exploring the stomach.

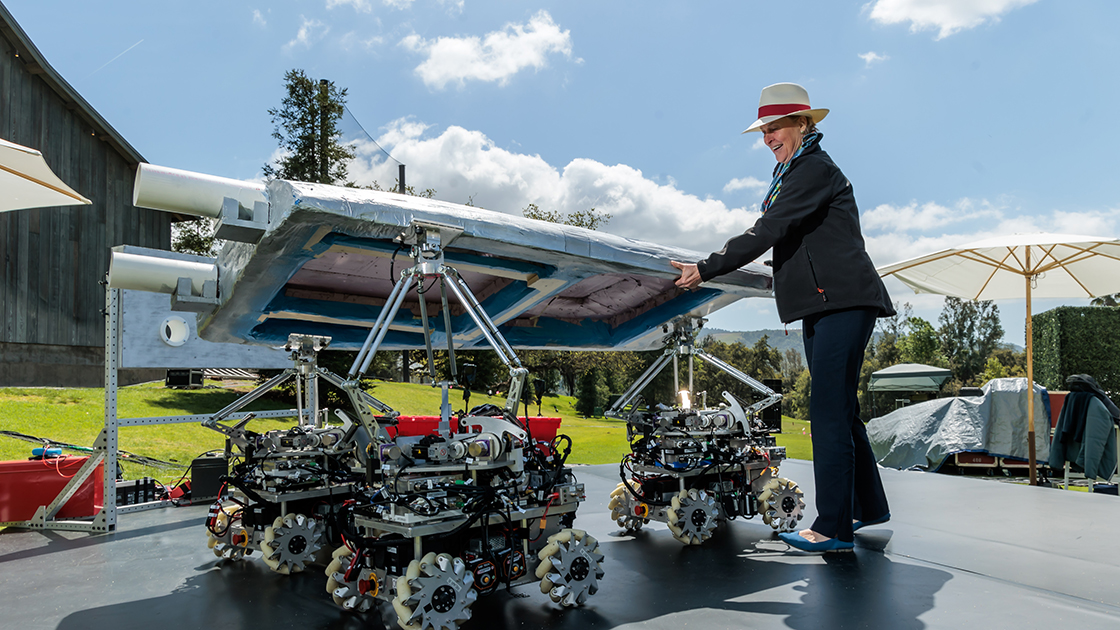
The Northwestern team was led by Professor Kevin Lynch and included assistant professor of instruction of mechanical engineering Matthew Elwin, staff engineer Davin Landry, PhD student Lin Liu, and undergraduate Damien Koh. MARS guests were invited to use the team of three Omnid mocobots to help them assemble a mockup of a plane wing to a simulated fuselage. This task would be nearly impossible for a single human and taxing for a team of humans, but it’s a breeze for a single human working with mocobots that cancel the effect of gravity on the wing.
Bezos wasn’t the only one to try out the robots. Others who got a firsthand look at the future of human-robot collaboration included business and technical leaders at Amazon, NASA, Nasdaq, Toyota, Disney, Nvidia, and more.
“It was a unique opportunity to network with leaders in science and engineering, and it was rewarding for our team to be able to show off their hard work to an appreciative and knowledgeable audience,” said Lynch, professor of mechanical engineering and director of the CRB.
Developed by a team including former CRB research engineer Billie Strong and more than a dozen McCormick School of Engineering master’s and undergraduate students, mocobots collaborate with each other and one or more human operators. Honed over five years, the system offers new opportunities for human-robot interaction in physically demanding environments where teams of robots could help workers manipulate a variety of large, articulated, or flexible objects without the physical hardship. The Omnid mocobots continue the Northwestern tradition in “cobotics”: robots designed to work with humans to achieve capabilities that humans or robots could not achieve on their own.




Making it happen
Last year, a team of MARS staff became aware of the mocobots and contacted Lynch and Elwin, inviting them and their team to apply for the 2024 event. Subsequently, they were notified that the mocobots were selected for inclusion.
There was just one issue.
Though the robots were functional, they were fragile “research-only” devices that had never been used beyond Northwestern. Given an early March 2024 deadline to send the robots to California, Lynch and Elwin decided to use the challenge as a project for students. The students were tasked with modifying the robots to make them robust enough for shipping and use by others over long periods of time.
Along with the team that demonstrated the robots at MARS, a group of two master’s students and nine undergraduates deconstructed the robots and redesigned the electrical systems and some mechanical components.
The team members were:
Master’s students: Terry Zhang, Cristian Villazhanay
Undergraduate students: Gautham Anne, Aya Ben-Saghroune, Jonathan Chan, Adwait Ganguly, Thomas Hoang, Yanni Kechriotis, Ami Takamatsu, Alazar Tegegnework, Mark Zhang
Clearly, the group’s work paid off.
“This meant that the robots were no longer working until just a few days before we shipped them to MARS. The students put in a lot of long nights and made a heroic effort to produce this complex engineered system as finals week approached, and the end result was a robust system that worked really well at the conference,” Lynch said. “Guests were able to use the robots effectively with zero training. The most common comment we got was 'This is so cool!’”