Scaling up for the Red Planet
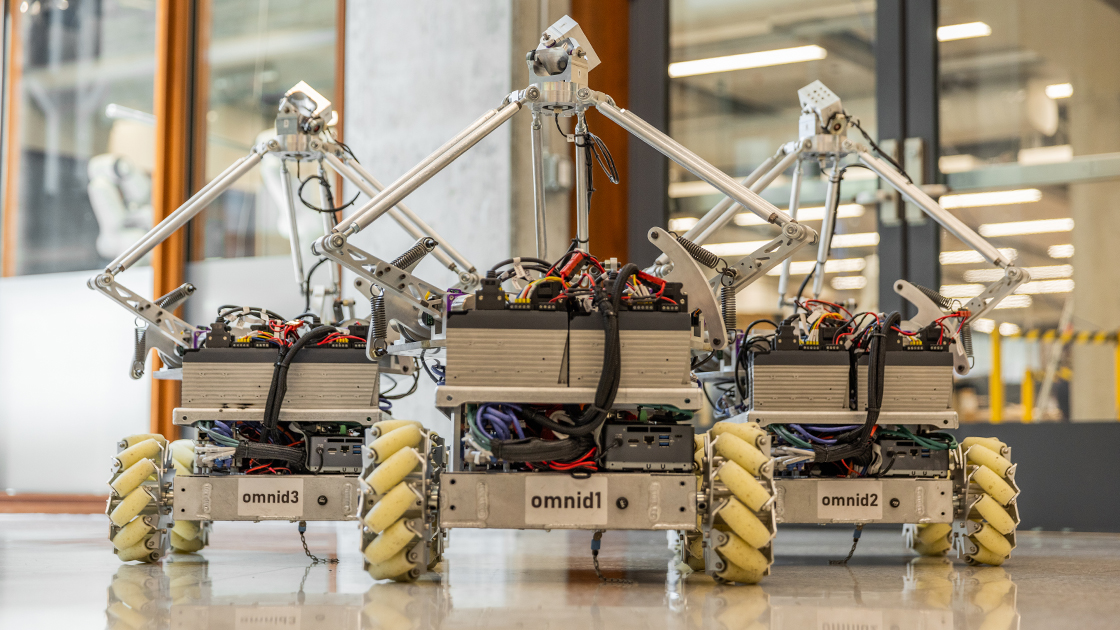
As described earlier, the team’s first tests featured three mocobots collaborating with one or two human operators to install a PVC pipe and to transport and manipulate an articulated object—a 12-foot-long wooden assembly with a hinge joint. In the future, more mocobots could support more complex objectives and manipulation of flexible or articulated payloads with many degrees of freedom.
“We envision larger teams of even more powerful mocobots helping one or a few humans assemble large structures—a blade on a wind turbine, for example—in manufacturing and construction settings,” Lynch says. “The system is designed to be scaled.”
These robots’ potential applications are not limited to Earth. As space travel could take humans to the moon and Mars in the coming decades, Lynch says mobile collaborative robots will play an important role.
“We’ll need those robots to be able to work with humans on Mars right away, since we won’t have automated factories there for a long time,” Lynch says. “Mobile collaborative robots could help install solar panels on Martian habitats or build structures. While our prototypes are designed for indoor use, the principles of force control and passive elasticity in our mocobots could be applied to treaded or legged robots on rocky Martian terrain.”
While mocobots are capable of autonomous manipulation using either preprogrammed controllers or strategies learned from their human collaborators, Lynch believes their flexibility to collaborate physically with people will be an enduring advantage.
“It’s difficult to achieve complete robotic autonomy, and humans offer sensing, adaptability, situational awareness, and task understanding—qualities that are difficult to replicate,” Lynch says. “The goal of our research is to take advantage of what the human does well while allowing the robots to do most of the work. The Omnids achieve that goal, allowing for mobile robot teams to collaborate safely and effectively with humans for the first time.”
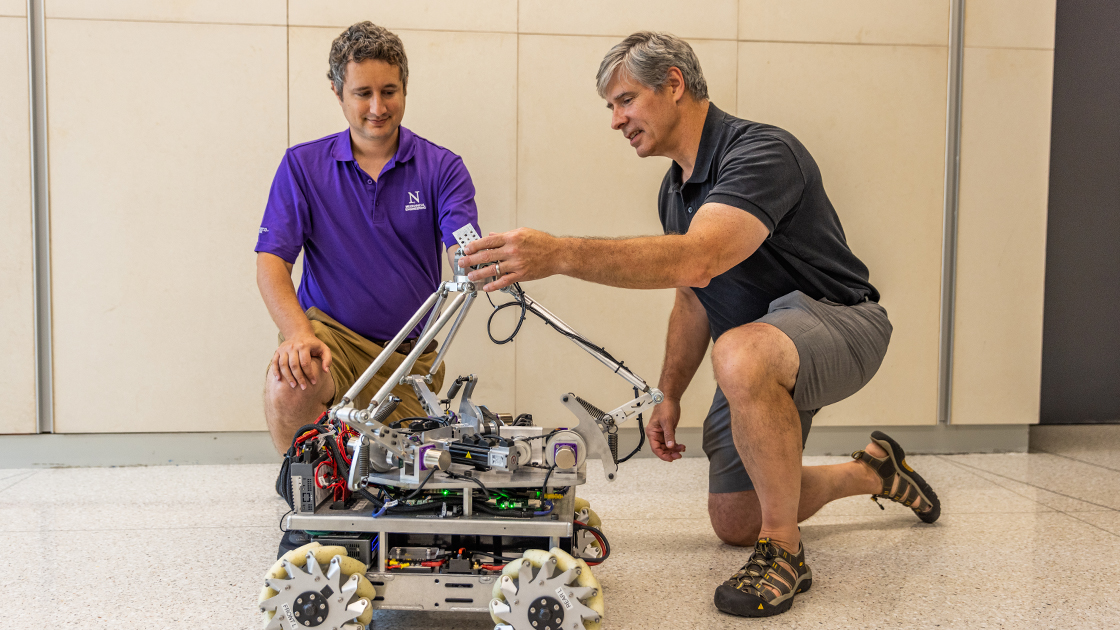
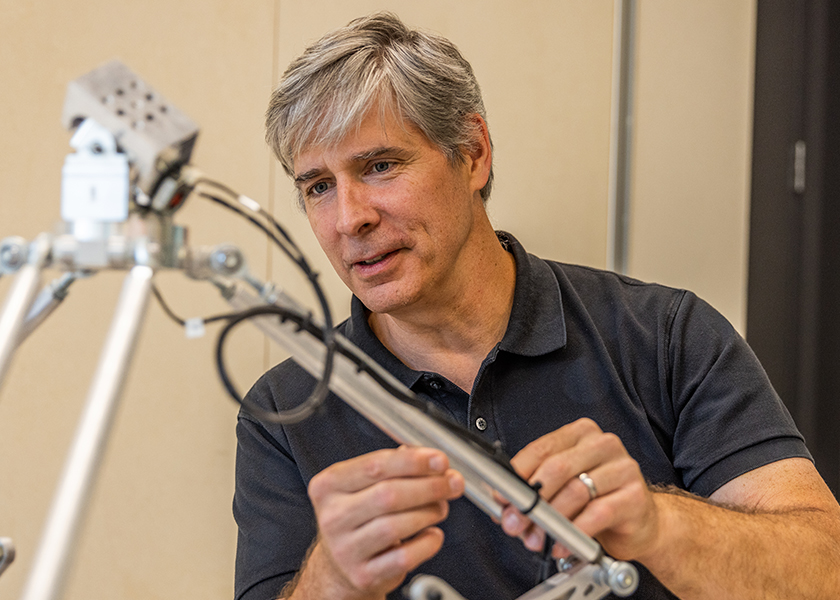
Photography by Matthew Allen