Recap of the Fall 2014 Quarter
The first quarter for the 2014-2015 MSR cohort is now complete! All 15 of the current students were enrolled in Theory of Machines - Dynamics, Robotic Manipulation, and Embedded Systems in Robotics. For their fourth and final course the students enrolled in courses such as Machine Learning and Articficial Intelligence for Robotics, Biometrics, and Computational Geometry. These courses together resulted in a heavy workload due to a variety of project-oriented, open-ended assignments, and exposure to a multitude of new programming languages. On top of the coursework, the students all spent time on activities such as applying to internships and PhD programs, attending weekly MSR professional and technical development meetings, developing project portfolios, and playing on MSR teams for intramural volleyball and dodgeball. Overall, it was a very busy quarter, but the students still managed to complete some really interesting projects.
In the Embedded Systems in Robotics course, after covering some introductory material, the MSR students worked in teams of 2 or 3 on a wide variety of "mini projects". The goal of these mini projects was to explore some portion of the Robot Operating System's (ROS) ecosystem that the course had not yet covered. Each group was then responsible for documenting and presenting what they learned, publishing their code to GitHub, and creating tutorials to reproduce their demonstrations and experiments. Mini project topics included the following:
- rosjava and Android
- Kinematics and geometry in ROS using the Sensable Phantom Omni (now called the Geomagic Touch)
- Tag tracking packages available in ROS
- Robot Web Tools for web-enabled robot control
- Gazebo and ROS Control for simulation
- Point Cloud Library (PCL) for processing data from 3D sensors
- ROS on a Raspberry Pi
- 6D pose estimation using the rpg_monocular_pose_estimator package
The course ended with the students tackling four separate group projects. Two projects focused on using the KUKA youBot platform, and two focused on the Baxter Research Robot from Rethink Robotics. These projects were very ambitious, and involved many unique challenges that had to be overcome. The students were largely responsible for developing and implementing strategies for accomplishing the tasks with only minor guidance from MSR faculty. Below is a short description of each of the projects and several relevant videos.
Baxter Density Sorting
This project set out to sort objects on a table by density. First, using an ASUS Xtion PRO LIVE, estimates of the volume of each of the objects were calculated. Then, each object was picked up, and Baxter's joint torques were used to estimate the relative masses of the objects. Knowing the mass and volume allowed the density and desired sorting order to be calculated. Using this order, the objects were then sorted. See a video of the project in action below:
Baxter Stocking Stuffer
This project boiled down to implementing automated part sorting. Challenges included identifying objects on a table, determining which Christmas stocking the objects belonged two, and planning paths for grasping and depositing the object in the correct stocking. A video of the project in action is below:
youBot Retrieve
This project was aimed at combining autonomous navigation and manipulation to automatically detect and retrieve wooden blocks from a space and return them to the starting location. A video of this project can be seen below:
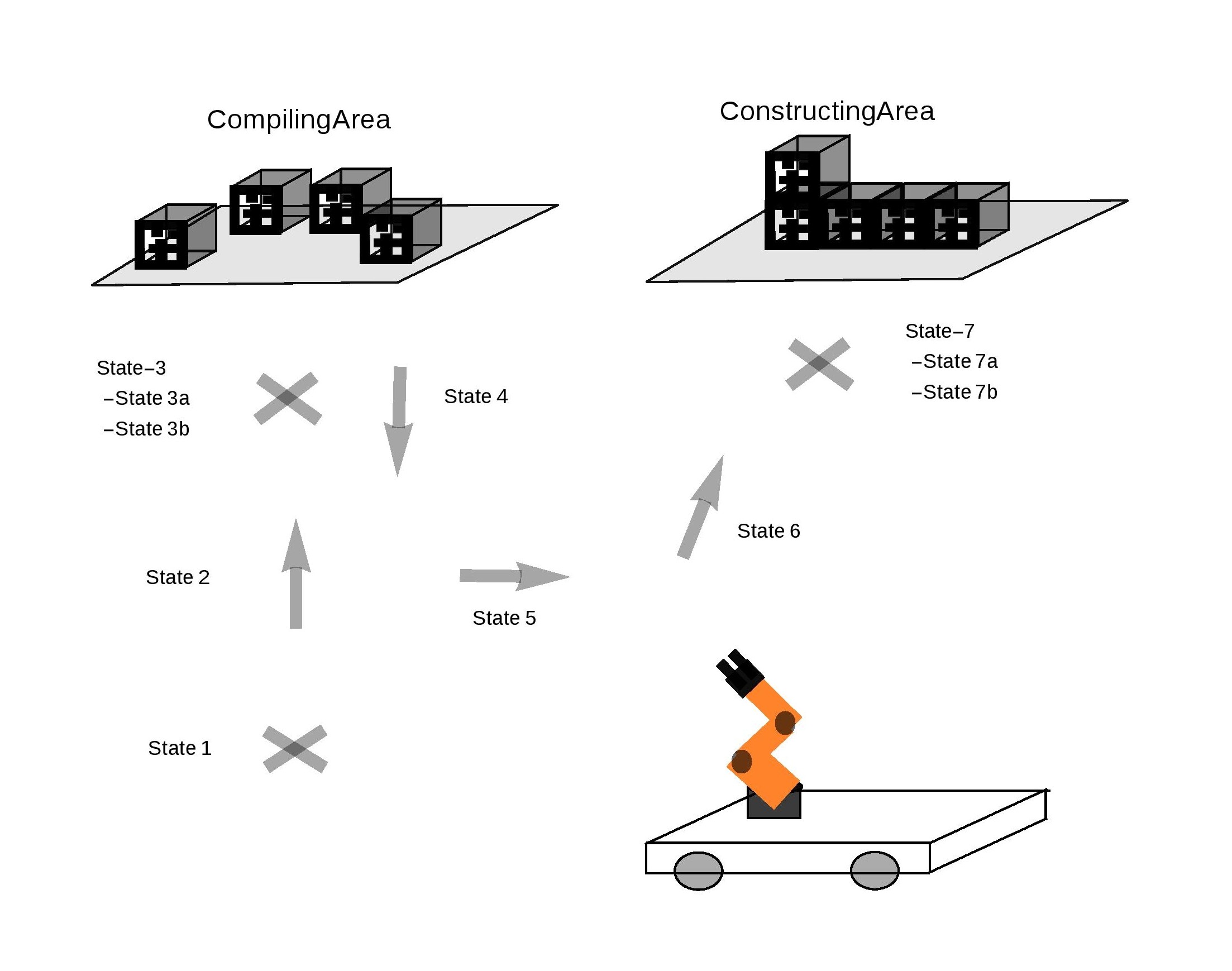
youBot Block Building
This project was aimed at autonomously building a desired structure from a set of wooden blocks. The key parts of this project functioned individually, but under the enormous time pressure, the team was unable to get the all of the pieces working together well enough to put together a demo video. This was an extremely difficult project considering the time allotted, and even though they were ultimately unsuccessful, the team did a fantastic job and learned a lot in the process!