Computer Vision and SLAM with Novel Whisker Sensors
Luxi Huang (MSR '20) looks back on her final Master of Science in Robotics (MSR) project and shares the significance of studying a seal's whiskers.
Seals and sea lions are both pinniped mammals, with four flippers instead of arms or legs. While the two water-based animals are commonly mistaken for one another, they have many differences, from the size of their flippers and the sounds they make to the way they move on land and their desire to socialize.
As they relate to the field of robotics, the difference in whiskers on seals and sea lions are even more significant, as Luxi Huang (MSR '20) explained in her final project for Northwestern Engineering's Master of Science in Robotics (MSR) program. "Different animals have different shapes of whiskers, which contain various tactile sensibilities and sensor purposes," Huang said. "By understanding the differences, we may explore and design new sensors which can be implemented on robots."
The significance of those sensors would be profound, as they would help robotic devices better navigate the environment around them. Sensors based on touch, rather than light, are useful for robots that need to operate in dark and difficult environments where traditional sensors fail.
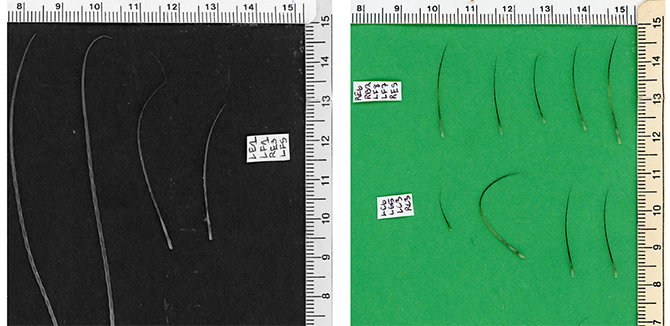
Huang's investigation was a geometric morphometrics project that automatically extracted information like length, diameter, and location of a crest or trough from an image of a seal's whiskers. The project required computer vision and image processing skills, two topics Huang recognized the value of and wanted to further explore before completing MSR.
Her final project aimed to automatically detect eight parameters from 500 seal whiskers. Seal whiskers are extremely thin, making extracting any information from a single whisker difficult. To offset this, Huang implemented multiple image processing methods to reduce background noise in an image. By the end of the quarter, the system was consistently achieving accurate results above 90 percent.
Huang then took that information and implemented a simulation of a robot navigating an environment using only the sense of touch. Based on the information provided by where the whisker hit an object, the robot was able to determine its position relative to the environment using simultaneous localization and mapping.
Huang is interested in bio-inspired robotics, and her work on the final project added to her passion for the field. Her time in MSR gave her the chance to do projects focused on perception, motion planning, SLAM, navigation, and machine learning. It was a learning process, one that she is excited to continue building on.
"I was surprised how much I learned by the end of MSR," Huang said. "My professors not only taught me the knowledge of robotics, but more importantly, they taught me how to explore and learn new things by myself."
