 Research
ResearchMobile Cobots Offer Glimpse of Future of Human-Robot Interaction
Team-based robotics system could support humans working in construction zones, manufacturing plants
More than 25 years after Northwestern Engineering researchers advanced the concept of collaborative robotics, or “cobots,” researchers in the Center for Robotics and Biosystems have designed team-based mobile cobots that could welcome a new era of human-robot interaction in construction zones, manufacturing plants, and even on Mars.

Developed by a team of more than a dozen McCormick School of Engineering faculty, master’s students, and undergraduates, these “mocobots” collaborate with each other and one or more human operators. Developed over five years, the system offers new opportunities for human-robot interaction in physically demanding environments where teams of robots could help workers manipulate a variety of large, articulated, or flexible objects without the physical hardship.
“Instead of having a single large robot that could manipulate anything you could ever want — which could be cost or space prohibitive for many users — why not have more, smaller robots that could easily adapt to the task at hand?” said Kevin Lynch, professor of mechanical engineering and director of the Center for Robotics and Biosystems, who led the project. “Particularly if the payload is fragile, articulated, or flexible, you need many distributed points of contact between the robots and the payload.”
Built from scratch
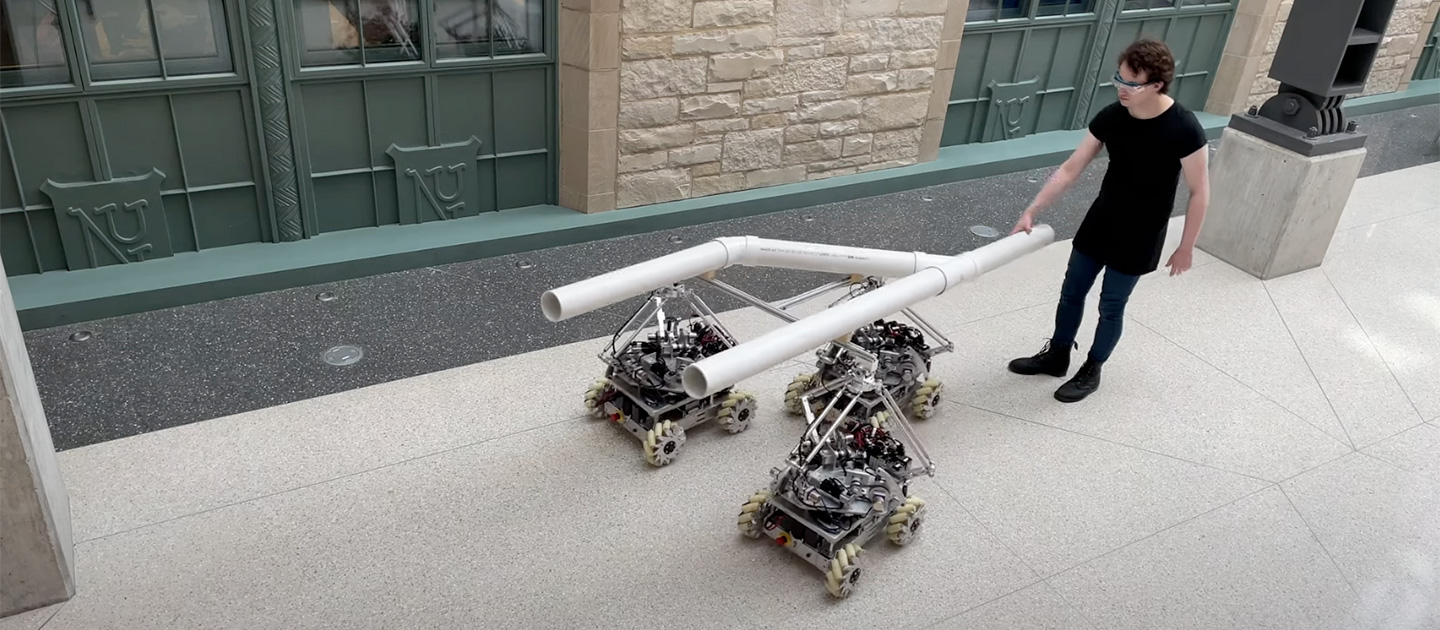
With its robot manipulator and omnidirectional, mecanum-wheel mobile base, the mocobot prototype, dubbed “Omnid,” resembles other mobile robotic manipulators on the market today, yet the machine is specifically designed and custom made for safe and effective collaboration by a team of robots and humans.

“Many existing mobile manipulators are designed to operate independently — a single robot manipulates a single object,” said Matthew Elwin, assistant professor of instruction in mechanical engineering, who worked on the project. “Some researchers have even experimented with small teams of such robots manipulating a common object. The problem is that these robots are not designed for safe human interaction, nor for safe cooperative manipulation of fragile objects. The robots overconstrain the object, and any errors in the robots’ motion can result in large internal forces on the object.”
The mocobot’s differentiator is its built-in passive elasticity, found in spring-loaded actuators within its three-degree-of-freedom Delta manipulator. This feature produces a springy response to different levels of force caused by the object’s weight, forces from a human, or the robot’s own movements. When coupled with the mobile base and a three-degree-of-freedom passive gimbal wrist, the manipulator allows multiple mocobots to work cooperatively to render large objects weightless to the human collaborator.
“Where most robots are good at controlling their positions, our robots are good at controlling applied forces while also having passive elasticity for safety,” Lynch said. “That passive elasticity kicks in right away to prevent the object from breaking, the human from getting hurt, or robots from being damaged.”
Scaling up
The team’s first tests featured three mocobots collaborating with one or two human operators to install a PVC pipe into a wooden structure and to transport and manipulate an articulated object — a 12-foot-long wooden assembly with a hinge joint. In future, more mocobots could support more complex objectives and manipulation of flexible or articulated payloads with many degrees of freedom.
We envision larger teams of even more powerful mocobots helping one or a small number of humans assemble large structures in manufacturing and construction settings, such as a blade on a wind turbine. Professor of Mechanical Engineering,
Director of the Center for Robotics and Biosystems
“We envision larger teams of even more powerful mocobots helping one or a small number of humans assemble large structures in manufacturing and construction settings, such as a blade on a wind turbine,” Lynch said. “The system is designed to be scaled.”
These robots’ potential is also not limited to Earth. As space travel takes humans to Mars in the coming decades, Lynch said mobile collaborative robots will play an important role.
“We’ll need robotic assistance on Mars, and we’ll need those robots to be able to work with humans right away, since we won’t have automated factories there for a long time,” Lynch said. “Mobile collaborative robots could help install solar panels on Martian habitats or build structures. While our prototypes are designed for indoor use, the principles of force control and passive elasticity in our mocobots could be applied to treaded or legged robots on rocky Martian terrain.”