New Model of Whiskers Provides Insight into Sense of Touch
Watch an NPR ScienceFriday video about the research:
Researchers at Northwestern University have developed a model that will allow them to simulate how rats use their whiskers to sense objects around them. The model enables further research that may provide insight into the human sense of touch.
Hundreds of papers are published each year that use the rat whisker system as a model to understand brain development and neural processing. Rats move their whiskers rhythmically against objects to explore the environment by touch. Using only tactile information from its whiskers, a rat can determine all of an object’s spatial properties, including size, shape, orientation and texture.
But there is a big missing piece that prevents a full understanding of the neural signals recorded in these studies: no one knows how to represent the “touch” of a whisker in terms of mechanical variables.
“We don’t understand touch nearly as well as other senses,” says Mitra Hartmann, associate professor of biomedical engineering and mechanical engineering at the McCormick School of Engineering and Applied Science. “We know that visual and auditory stimuli can be quantified by the intensity and frequency of light and sound, but we don’t fully understand the mechanics that generate our sense of touch.”
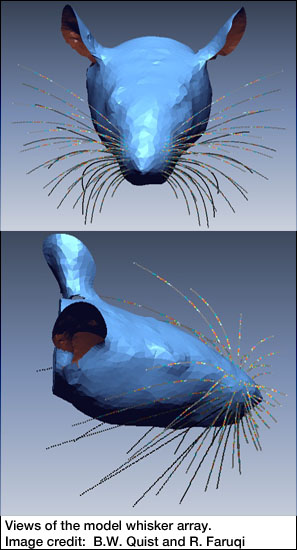 To create a model that starts to quantify these mechanics, Hartmann’s team first studied the structure of the rat whisker array – the 30 whiskers arranged in a regular pattern on each side of a rat’s face. By analyzing them in both two- and three-dimensional scans, they defined the relationship between the size and shape of each whisker and its placement on the face of the rat.
To create a model that starts to quantify these mechanics, Hartmann’s team first studied the structure of the rat whisker array – the 30 whiskers arranged in a regular pattern on each side of a rat’s face. By analyzing them in both two- and three-dimensional scans, they defined the relationship between the size and shape of each whisker and its placement on the face of the rat.
Using this information, the team created a model that quantifies the full shape and structure of the rat head and whisker array. The model now allows the team to simulate the rat “whisking” against different objects and to predict the full pattern of inputs into the whisker system as a rat encounters an object. The simulations can then be compared against real behavior.
The research is published online in the journal Public Library of Science Computational Biology.
Understanding the mechanics of the rat whisker system may provide a step toward understanding the human sense of touch.
"The big question our laboratory is interested in is how do animals, including humans, actively move their sensors through the environment and somehow turn that sensory data into a stable perception of the world," Hartmann says.
To determine how a rat can sense the shape of an object, Hartmann’s team previously developed a light sheet to monitor the precise locations of the whiskers as they came in contact with the object. Using high-speed video, the team can also analyze how the rat moves its head to explore different shapes. These behavioral observations can then be paired with the output from the model.
These advances will provide insight into the sense of touch but may also enable new technologies that could make use of the whisker system. For example, Hartmann’s lab created arrays of robotic whiskers that can, in several respects, mimic the capabilities of mammalian whiskers. The researchers demonstrated that these arrays can sense information about both object shape and fluid flow.
“We show that the bending moment, or torque, at the whisker base can be used to generate three-dimensional spatial representations of the environment,” Hartmann says. “We used this principle to make arrays of robotic whiskers that can replicate much of the basic mechanics of rat whiskers.” The technology, she said, could be used to extract the three-dimensional features of almost any solid object.
Hartmann envisions that a better understanding of the whisker system may be useful for engineering applications in which the use of cameras is limited. But most importantly, a better understanding of the rat whisker system could translate into a better understanding of ourselves.
“Although whiskers and hands are very different, the basic neural pathways that process tactile information are in many respects similar across mammals,” Hartmann says. “A better understanding of neural processing in the whisker system may provide insights into how our own brains process information.”
The title of the paper is “The Morphology of the Rat Vibrissal Array: A Model for Quantifying Spatiotemporal Patterns of Whisker-Object Contact.” In addition to Hartmann, other authors of the paper are Blythe Towal, Brian Quist and Joseph Solomon, all of Northwestern, and Venkatesh Gopal of Elmhurst College.